Shared Autonomy for Heterogeneous Human-Robot Teams
The aim of this research is to fuse the unparalleled cognitive skills of humans with the capabilities of different robots – such as the monitoring skills of drones, the high precision of manipulators and the high payload capabilities of wheeled mobile robots – creating a team that safely and intuitively works together in highly dynamic scenarios such as the industrial and the agricultural ones.
In this research line, human agents are allowed to physically become part of the team, moving in the same environment of the robots and receiving information about the team status, that is provided to the humans through an unobtrusive and intuitive feedback (e.g., haptic bracelets or augmented-reality glasses). Our objective is to bring human agents back into the scene, by augmenting their actions through a team of fast-responding robots, foreseeing improvements in the efficacy, flexibility, and situational awareness of the response. To achieve such a level of team integration and control, so as to carry out meaningful collaborative tasks, we need to study and to develop a series of theoretical and technological methods dealing with human-robot communication, shared autonomy and localization for multi-robot systems, as described in [1].
This research has three main goals
- Enable a team composed of multiple robots and humans to intuitively and naturally interact with each other by finding novel theoretical approaches and scientific solutions advancing the state-of-the-art toward disruptive shared autonomy algorithms that allow robots to adapt their autonomy in function of the estimation of the human intentions and the environmental conditions;
- Provide the human operators with rich feedback information about the status of the team (e.g., battery levels, inter-agent distance, robot faults, positioning with respect to the human users) and the current task (e.g., distance from target, map coverage achieved, error in following a path) in a comfortable, effective, and unobtrusive way;
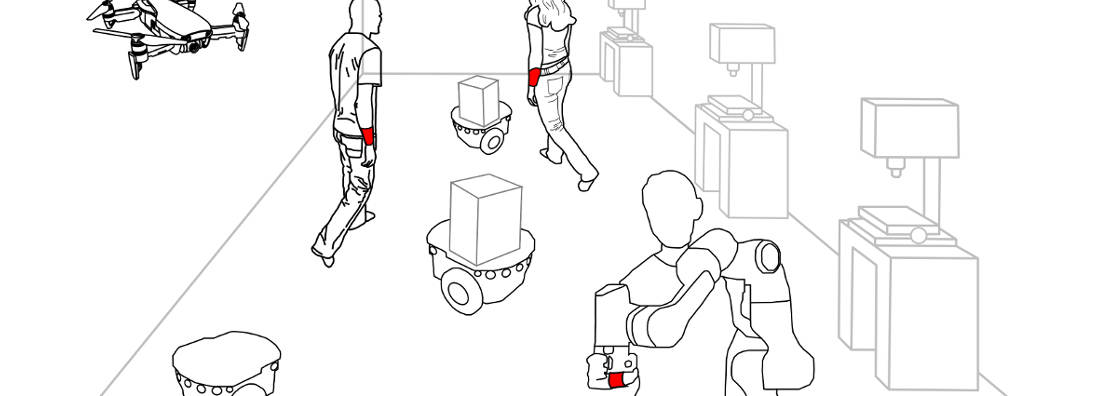
- Apply and evaluate the proposed approach to high-impact robotic applications: This project will focus on industrial and agricultural applications, evaluating them in real-world scenarios using human-subjects studies that consider both objective and subjective metrics. An example of an industrial application is described in the figure below.
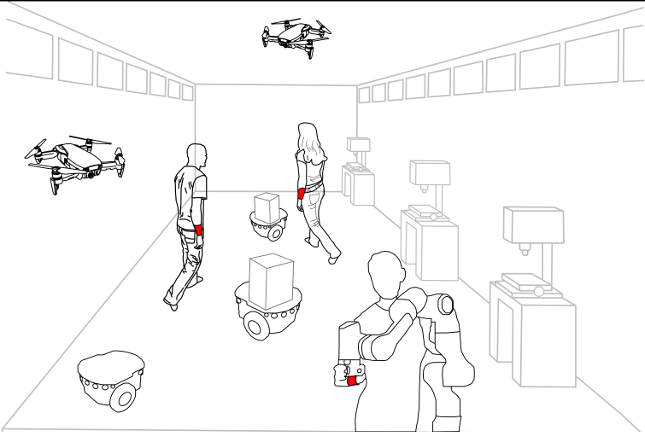
Fig 1: An example of heterogeneous robot-human teams in an industrial scenario: The drones have a supervision role, patrolling the environment and detecting potentially dangerous situations. The robots can fulfill autonomous (in this case they navigate for delivering packages) or collaborative tasks (as the manipulator in the figure). The humans are informed about the team state through wearable haptic devices (the red bracelets in the figure), allowing a safe sharing of the working environment and an effective and natural human-robot collaboration.
Contact
If you have any questions please contact marco.cognetti@mu.ie
Reference
[1] M. Selvaggio, M. Cognetti, S. Nikolaidis, S. Ivaldi and B. Siciliano, "Autonomy in Physical Human-Robot Interaction: A Brief Survey," in IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 7989-7996, Oct. 2021 (pdf)